
Não se limite a pensar que cores são apenas uma aquarela de tintas misturadas, o Vlavaav do arco-íris, o escuro e claro. Esse é a primeiro passo que gostaria que você entendesse. Para entender o que quero lhe passar, este post vai explicar como e o que nós humanos enxergamos, o que alguns animais enxergam, e um pequeno mundo de possibilidades que os computadores podem e poderão enxergar.
O primeiro passo para entender este universo de possibilidades é entender o que são cores e quais cores nós conseguimos enxergar. Nesta primeira parte, serão explicados conceitos básicos sobre frequência de cores e sua percepção através do olho humano e como funciona o olho humano.
Tudo o que sabemos sobre cores hoje em dia, iniciou em 1660, quando o cientista britânico Isaac Newton descobriu que, ao atravessar um feixe de luz solar num prisma de vidro, o feixe de luz sofria decomposição em uma gama de cores similares às do arco-íris. Newton concluiu que as cores que visualizou, faziam parte da luz solar branca. Logo em seguida, conseguiu demonstrar que, após decompor a luz branca com um prisma, poderia recompor as cores dispersadas com outro prisma invertido obtendo novamente a luz branca. [C] A ilustração da Fig.1, apresenta o espectro de cores produzido neste experimento, dividido em 7 regiões: vermelho, laranja, amarelo, verde, azul, anil, e violeta.

No experimento de Newton, conclui-se, que a cor branca é composta por todas as demais, com o violeta em uma extremidade ao vermelho na outra [GW]. As cores são formadas, por frequências da radiação eletromagnética e todas estas variações de frequência compõem o espectro eletromagnético conforme ilustrado na Fig. 2.
Por muito tempo, achou-se que a luz era a única parte conhecida deste espectro, porém ela representa uma parte muito pequena dele. O espectro se estende desde as ondas de baixa frequência, ondas de rádio, até as de maior frequência como as da radiação gama. Todas estas variações de frequências, servem como áreas de aplicação do processamento de imagens.
Uma forma fácil, de compreender a extensão de aplicações de processamento de imagens e possibilidades que um computador consegue enxergar, é categorizar estes espectros como, espectro de luz visível humana, raio x, infravermelho e assim por diante. Porém, ao categorizá-los não devemos esquecer que podemos utilizar mais de uma categoria ao mesmo tempo, como extração de informação. Na parte final deste post, são demonstrados alguns exemplos de informações, passíveis de serem extraídas, ao misturarmos os espectros eletromagnéticos.
Espectro visível da luz

Se observarmos a Fig. 2, percebemos que a variedade de cores que enxergamos é muito pequena, comparada a todo o espectro eletromagnético, também podemos observar que a frequência de radiação do espectro, pode ser interpretada como ondas senoidais, de vários comprimentos diferentes ou também, pode ser vistas como um fluxo de partículas sem massa, cada uma se deslocando em um padrão ondulatório diferente e se movendo na velocidade da luz [GW]. O espectro, pode ser expressado em comprimento de onda, frequência ou energia. Cada partícula sem massa, contém uma certa quantidade de energia. Cada quantidade de energia, é chamada de fóton e a energia é proporcional à frequência, onde, frequências mais altas, apresentam mais energia por fóton [GW]. Desta forma, as ondas de raios gama possuem fótons de mais energia, e na outra extremidade, as ondas de rádio possuem fótons de menos energia.
Todas estas categorias, de frequências de radiação, foram descobertas em um longo período da história. A primeira descoberta de outras frequências de radiação, além da luz enxergada pelos humanos, foi em 1800, quando Willian Herschel descobriu a radiação infravermelho [IDL]. No ano seguinte, Johann Wilhelm Ritter realizou estudos na outra ponta do espectro visível e percebeu a existência do que ele chamou de “raios oxidantes”, posteriormente de “raios químicos”, e futuramente renomeado para radiação ultravioleta [PEH]. Em 1886, Heinrich Hertz construiu um aparelho para gerar e detectar a existência da radiação eletromagnética (de baixa frequência), na tentativa de provar uma teoria de James Clerk Maxwell, e demonstrou a existência do que chamamos hoje de ondas de rádio [WG]. Em 1895, Wilhelm Röntgen percebeu um novo tipo de radiação emitida durante um experimento com um tubo com vácuo sujeito à alta voltagem. Ele chamou essa radiação de raios-X e descobriu que eles eram capazes de atravessar partes do corpo humano, mas eram refletidos ou parados por materiais densos, como os ossos [WCR].
Todo este espectro, ilustrado na Fig. 2, é passível de ser capturado por computadores, desde que esteja com um equipamento adequado para isto, mas antes de adentrar a captura do espectro de luz por equipamentos eletrônicos, vamos entender como nós humanos enxergamos.
Sistema Visual Humano
A visão humana, envolve diversas funções complexas, como detecção, localização, reconhecimento e interpretação de objetos e ambientes. Uma vez que procuramos transferir esta capacidade para os computadores, é necessário compreender o funcionamento do sistema visual humano, sob os diversos aspectos psicofísicos e neurofisiológicos, como um primeiro passo na jornada. [PS].
Apesar da complexidade deste tópico, nosso alcance se limitará a aspectos mais rudimentares, concentrando na mecânica relacionada à formação e percepção das imagens pelos humanos.
A Figura 3, ilustra um corte transversal do olho humano. O olho é praticamente uma esfera de 20 mm. O globo ocular é revestido por 3 membranas: a córnea e a cobertura externa esclerótica; a coroide e a retina. A córnea é um tecido externo que cobra a superfície anterior do olho, e a esclerótica um prolongamento da córnea que reveste o restante do globo ocular [GW].

A coroide está localizada abaixo da esclerótica. Esta membrana contém uma rede de vasos que atua como principal fonte de nutrição dos olhos. O revestimento da coroide é fortemente pigmentado, ajudando a reduzir a quantidade de luz indesejada que entra no olho [PS] [GW].
A íris, localizada no exterior da coroide, é a parte mais visível do olho e colorida. Existe um orifício em seu centro, chamado de pupila, cuja função é controlar a quantidade de luz que entra no olho. Em um ambiente com muita luz, ocorre a miose (diminuição do diâmetro da pupila), ao passo que, com pouca luz, ocorre a midríase (aumento do diâmetro da pupila) [CH].
O cristalino, localizado atrás da íris, é uma lente gelatinosa, cuja função é auxiliar a córnea a focalizar a luz. O cristalino é composto por 60% a 70% de água, 6% de gordura e mais proteína que qualquer outro tecido do olho. A distância focal do cristalino é modificada por um anel de músculos, esta movimentação permite focar a visão em objetos próximos ou distantes [GW]. O Cristalino absorve 8% do espectro de luz, a luz infravermelha e ultravioleta são absorvidos consideravelmente por proteínas contidas no cristalino [PS].
A retina
A membrana mais interna do olho, que se estende por toda a parede do olho, é revestida por tecidos nervosos, chamada de retina. A retina é responsável pela sensação de imagem visual e codifica essas informações com sinais nervosos e transmiti-las ao olho. Cada olho, envia ao cérebro uma imagem separada, porém, a imagem é vista como uma só devido a nossa capacidade de fusão [PS] [GW].
A retina é composta por dois tipos de células sensíveis à luz, os cones e bastonetes. Essas células transformam energia luminosa em pulsos elétricos, que são transmitidos ao cérebro.
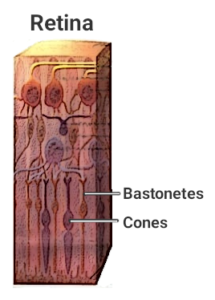
Fig. 4 Ilustração célula da retina. 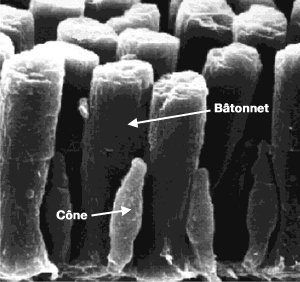
Fig. 5 Visão microscópica dos cones e bastonetes.


Os cones são altamente sensíveis a cores e responsáveis por distinguir detalhes nas imagens. Os bastonetes são mais sensíveis à baixa intensidade de luz e permitem uma percepção geral da imagem captada no campo de visão. Os bastonetes não estão envolvidos na percepção de cores [PS] [GW]. De uma forma grosseira, podemos dizer que os bastonetes captam o brilho, luminosidade, o preto e o branco, e os cones a variação de cores que enxergamos.
A retina, possui três tipos de cones, cada um deles responde a um espectro cromático específico. O primeiro, responde à luz de comprimentos de onda longos (564-580 nanômetros), chegando a uma cor vermelha. O segundo tipo responde à luz de comprimento de onda médio (534-545 nm ), atingindo um máximo de uma cor verde. O terceiro tipo responde mais a curto comprimento de onda de luz (420-440 nm), de cor azulada. [PS].
A lente e córnea do olho humano, são limitadas na absorção de comprimentos de onda menores com limite em cerca de 380 nm, que é, portanto, chamado de luz ‘ultravioleta’. O mesmo acontece na outra extremidade, onde o olho humano não consegue enxergar, ou absorver, comprimentos de ondas maiores superiores ao vermelho e portanto não consegue enxergar o infra vermelho.
Formação da imagem no olho humano
O processo de formação, inicia com a luz atravessando a córnea e chega a íris, onde a pupila controla a intensidade de luz a ser recebida pelo olho. Quanto maior a abertura da pupila, maior é a quantidade de luz que entra nos olhos. A imagem chega então ao cristalino, uma estrutura flexível, que acomoda e focaliza imagens próximas ou distantes na retina, que então capta a luz e a cor.

Na região central da retina, está a Fóvea, uma região onde as células nervosas estão afastadas para o lado, permitindo que a luz atinja diretamente os receptores (cones) . Na Fóvea, a acuidade visual é máxima e para manter nítida a imagem de interesse, precisamos focalizá-la constantemente sobre a fóvea e, para isso, os músculos que movem os olhos e o sistema de lentes devem trabalhar juntos e de modo coordenado. A medida que a região se afasta da fóvea a quantidade de cones diminui e a de bastonetes aumenta, até que não haja mais cones. Isso significa, que há um campo visual central e outro periférico distintos: o centro proporciona nitidez e visão colorida e o periférico, menos nitidez [NKOT].
O Que Computadores Podem Enxergar
Agora que já sabemos como nós humanos enxergamos, vamos explorar as diferentes formas que os computadores podem enxergar. Através de equipamentos eletrônicos, os computadores são capazes de captar todo o espectro eletromagnético, basta apenas o equipamento adequado; uma câmera fotográfica para captar a luz; uma câmera térmica para captar a radiação térmica, uma raio x para radiografias e muito mais.
Além de captar a informação, também existem equipamentos capazes de emitir determinada faixa do espectro como emissores infravermelho e raios lazer, que podem ser utilizados junto a sensores para criar câmeras 3D.
Através de diferentes tipos de equipamentos, nós humanos e computadores podemos ver e captar outras informações que vão muito além do que a retina envia ao cérebro. Nesta seção, são abordados diversos eletrônicos disponíveis para captura de imagens e descrito brevemente seu funcionamento.
Câmera fotográfica e filmadora
Sensores e aquisição de imagem
Câmera infravermelha (IR)

Diferente do que muito se imagina, as câmeras infravermelha (IR) não enxergam no escuro, e sim captam um espectro eletromagnético um pouco abaixo do vermelho que nós humanos enxergamos. Este espectro, costuma ser chamado de Near-Infrared (NIR) ou Infravermelho próximo.

Se este tipo de câmera não enxerga no escuro, como ela consegue captar imagens mesmo com a luz apagada? A resposta é bem simples, há uma grande confusão em seu nome Câmera IR, que nos induz a pensar que ela capta o espectro IR, o que não ocorre. Na verdade, este tipo de câmera, possui um emissor infravermelho e deveria se chamar câmera com iluminador infravermelho.
A emissão IR, realizada por estas câmeras, são “luzes”, bem próximo ao espectro vermelho, mas não tão próximo, que nós humanos possamos enxergar, digamos assim. E essas “luzes” são captadas pelas câmeras IR.
As câmeras IR, não capturam o calor das pessoas como se imagina, mas sim o reflexo do IR emitido pela câmera, pois, todo objeto emite sua própria radiação infravermelha.
Após a captura dos sinais infravermelhos, o funcionamento da câmera IR é semelhante ao das câmeras fotográficas comuns: a luz é captada e transmitida para a tela, de uma forma que podemos enxergar, geralmente em preto e branco.
Porém, quando se trata de visão noturna, existem basicamente duas tecnologias disponíveis: as câmeras infra-vermelhas e as câmeras térmicas, as térmicas sim conseguem ver no escuro.
Câmera térmica
Uma câmera termográfica, ou câmera térmica, nada mais é do que um aparelho que possibilita a captura de luz infravermelha com o objetivo de transformá-la em uma faixa visível do espectro. Ou seja, através dela você consegue enxergar as imagens que são feitas a partir da radiação que um determinado objeto emite [IT] e diferente das IR elas enxergam no escuro.
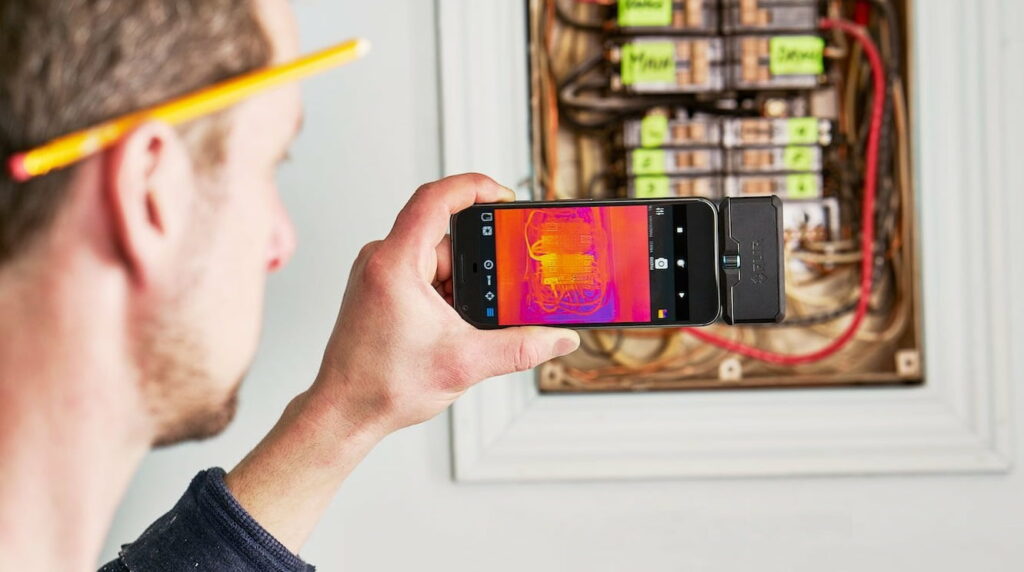
Fig. 8 – Câmera termal para iphone, 
Fig. 8 – Câmera termográfica E75 24

Pare se ter ideia, todo corpo que possui uma temperatura acima do zero absoluto, emite luz infravermelha. Dessa maneira, quanto maior a radiação emitida, maior será a temperatura do corpo em questão. Esse tipo de luz não pode ser vista a olho nu, por estar fora da zona da luz visível [IT].
As câmeras térmicas, funcionam de maneira diferente das emissoras de IR, elas detectam radiação térmica. Com esse nome, é possível pensar, que radiação térmica está apenas relacionada ao calor, porém não é bem assim. Qualquer tipo de radiação é térmica: ondas de rádio, radio-X, luz visível, luz infravermelha, etc. Por isso, a câmera térmica consegue, por exemplo, detectar o calor gerado pelo corpo humano ou um motor, que é de menor frequência . Esse calor, radiado por um corpo, apesar de estar muito abaixo da radiação infra-vermelha, detectada pelas câmeras infra-vermelhas, também é um radiação térmica e assim detectado por câmeras térmicas. [TER]
Dessa forma, as câmeras térmicas não precisam de iluminadores especiais para trabalhar. Essas câmeras não conseguem detectar cores ou variações de radiação. Quando temos câmeras térmicas que mostram cores, na verdade essas cores são artificiais, criadas apenas para indicar as áreas com mais ou menos radiação.
As câmeras termais, por não precisarem de emissor como as IR, têm o limite de distância de visibilidade apenas na qualidade do sensor e na quantidade de radiação térmica, emitidas pelos objetos monitorados.
Uma curiosidade, por questões de segurança pública, para realizar a aquisição das câmeras termais, é preciso um certificado de registro (CR) regulamentado pelo exército. Também é requerido o CR para venda pelo vendedor, para produção e para transporte pela transportadora.
Câmera 3D/Depth IR

Uma outra forma de utilizar emissores de infravermelho, é utilizá-los para captar a informação emitida e criar modelos 3D do ambiente. A câmera de profundidade Azure Kinect DK realiza este processo.
Para criar o ambiente 3D, o Azure Kinect DK realiza a técnica ToF (Tempo de Voo) com o tipo de emissão AMCW (Onda Contínua Modulada em Amplitude). A técnica de tempo de voo registra uma medição do tempo que leva para a luz viajar da câmera para a cena e voltar [MK]. Essas medições são processadas para gerar um mapa de profundidade.
Um mapa de profundidade é um conjunto de valores de coordenadas Z para cada pixel da imagem, medido em unidades de milímetros. Com o mapa de profundidade e as distância de cada pixel da imagem, em relação a câmera, é possível criar um ambiente 3D.
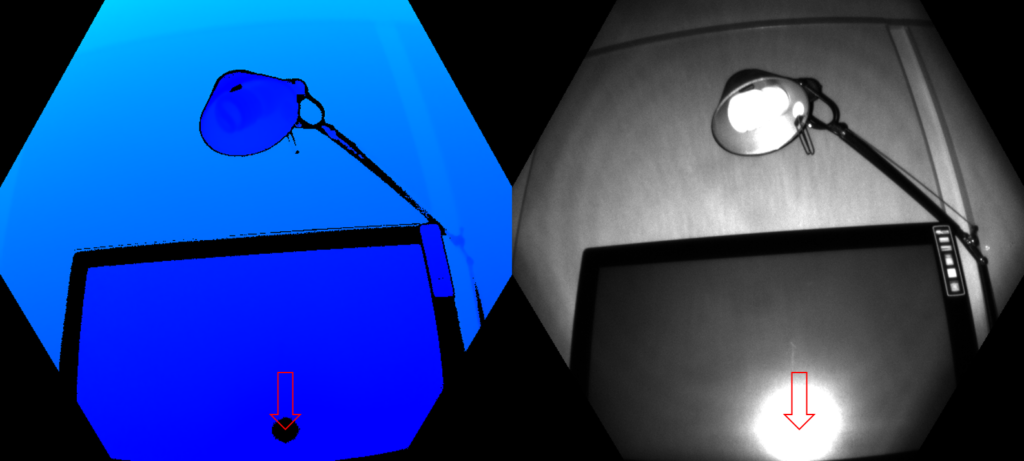
Fig. 10 – Saturação de invalidação. Autor: Microsoft 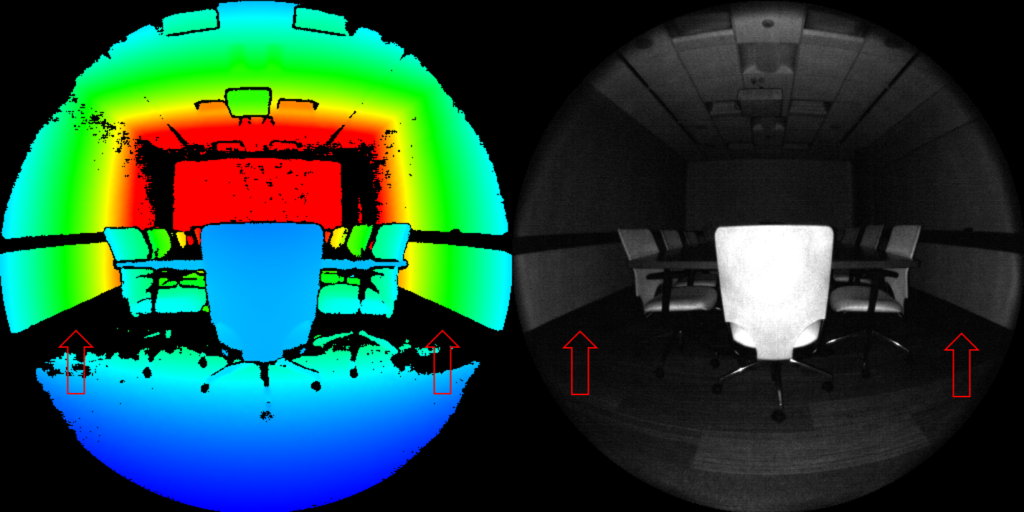
Fig. 11 – Profundidade e IR lado a lado. Autor: Microsoft


As câmeras 3D por IR, possuem curto alcance e são melhores em ambiente com luz controlada. Pela luz captada ser o infravermelho próximo, ela sofre interferência de luz ambiente, podendo invalidar a captura pelo sensor. Observe a seta na figura acima e a esquerda: a saturação da luz (muita energia), interferiu na captação dos raios NIR.
O mesmo ocorre, quando o sinal do IR é muito fraco e os sensores não conseguem captar o retorno, conforme Figura 11 acima.
Câmera/Scanner 3D/Depth Laser
As câmeras 3D a laser, criam modelos 3D a partir da técnica de tempo de voo, ToF, mencionada na seção anterior. Calculando a distância dos objetos, com base no tempo de resposta, entre o emissor e o sensor eletromagnético.
A grande vantagem do emissor laser é o nível de precisão altíssimo, capaz de capturar diferenças em milímetros de distância. O laser por ser monocromática, ou seja, constituída por radiações de uma única frequência, é muito potente em razão da grande concentração de energia em pequenas áreas (pequenos feixes) [ME].

Fig. 12 – Sensor 3D laser fixo 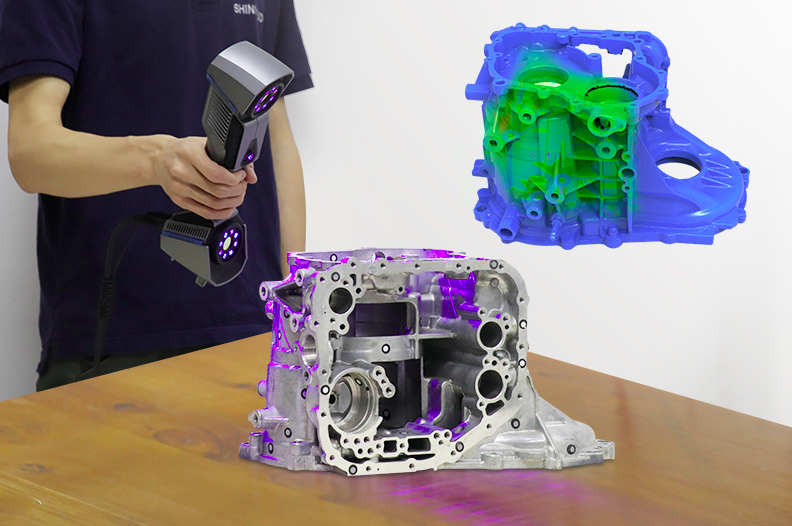
Fig. 13 – Sensor 3D laser manual


Os sensores 3D a laser, normalmente são projetados para capturar um feixe de luz ou uma pequena quantidade de pontos disperso. E para montar o modelo 3D, é preciso manusear o sensor na região de interesse.
Câmera 3D/Depth Estereoscópica

Visão estéreo é o ramo da visão computacional, que analisa o problema da reconstrução tridimensional de objetos, a partir de um par de imagens capturadas simultaneamente, mas com um pequeno deslocamento lateral. Esse tipo de técnica, tem como referência o par de olhos humanos e de muitos animais.
Esse deslocamento, entre as duas imagens, gera pequenas diferenças entre as imagens, quase imperceptíveis quando observadas separadamente, mas estas pequenas diferenças, que nos permitem ter uma percepção tridimensional do mundo externo. Definimos par estéreo como o par de imagens capturadas simultaneamente com um pequeno deslocamento de posição da câmara [INE].
Para entender melhor, como o processo de transformação de duas imagens bidimensionais é transformada em uma imagem de profundidade, observe a Figura 15. Note que existem duas imagens diferentes do mesmo homem dentro do quadro preto, com esta diferença e a informação da cor e brilho de cada pixel da imagem, é realizado uma procura de pixels similares nas duas imagens e realizado a triangulação (método para descobrir a distância entre 2 locais) e definido a profundidade de uma região(pixel). Este processo é realizado pixel a pixel da imagem.
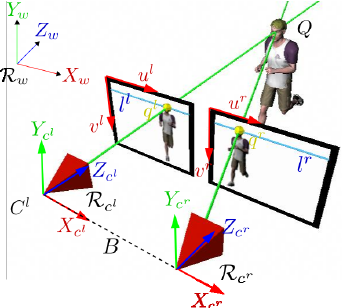
Fig. 15 – Ilustração de cálculos de visão estéreo. 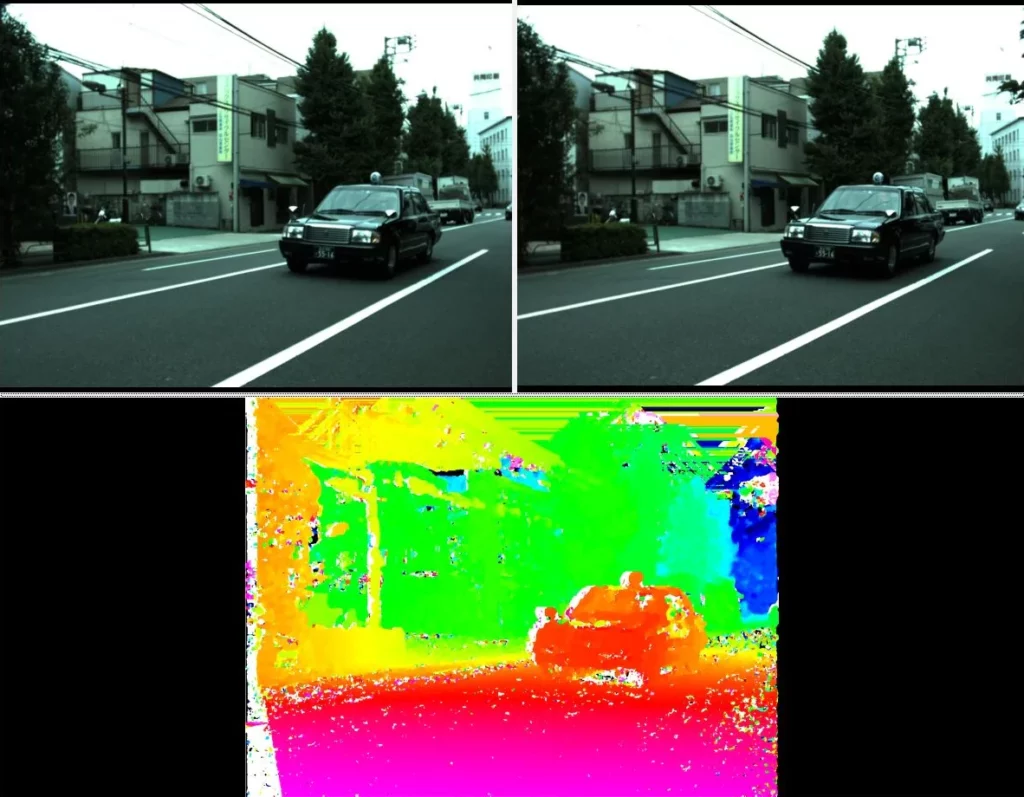
Fig. 16 – Demonstração visão estéreo.

Esta técnica, exige um grande processamento computacional e geralmente são realizados por hardwares dedicados a tarefa ou através de placas de vídeo, costumando ser bem desafiadora para área de visão computacional, pois podem existir vários problemas ao realizá-la, como por exemplo, duas regiões possuírem a mesma coloração ou até mesmo, mesmo objetos, ou ainda, existirem espelhos nas imagens, reflexos vistos apenas em uma das câmeras e muitos outros.
Apesar do custo de processamento ser elevado, esta técnica é uma tendência em modelagem 3D e é considerada uma técnica não invasiva, que não requer ação humana e que não intervém ao ambiente, como ocorre com as câmeras IR.
Equipamento de raio-X
Adentrando na área de medicina, o profissional que deseja trabalhar com visão computacional, deve conhecer os principais equipamentos utilizados para adquirir imagens computadorizas, iniciando pelo conhecido Raio X.
O equipamento de raio-X é um dos mais importantes quando o assunto é diagnóstico por imagem. Servindo para tirar radiografias, que são como fotografias da parte interna do corpo. Por meio dessas imagens, é possível observar estruturas anatômicas, como ossos, órgãos e vasos sanguíneos, sem precisar de cirurgia [JAM].
Atualmente, além do equipamento convencional, com tecnologia analógica, há opções digitais.
O aparelho raio-X convencional, costuma ficar fixo na sala usada para radiografias. Na área superior, fica a ampola de raios X, que tem os componentes responsáveis pela produção da radiação, uma abertura por onde sai o feixe de raios X e colimadores (utilizado para proporcionar uma dosagem radioativa de acordo com as especificações da terapia indicada) [JAM].
Depois de captar as imagens, esse equipamento faz a gravação em um filme, composto por sais de halogeneto de prata. Por isso, para visualizar as imagens colhidas durante a radiografia, é preciso revelar esse filme [JAM].
No equipamento de raio-X digital, a principal diferença está na forma de captação e formação das imagens. O digital capta os dados por meio de uma placa sensível à radiação e em seguida, forma as imagens em pixels em conexão direta ou indireta com o computador [JAM].
A tecnologia digital também possibilita a obtenção de imagens claras com tempo reduzido de exposição do paciente aos raios X [JAM].

Fig. 17 – Raio X mãos. 
Fig. 18 – Raxio X torax.


Fig. 19 – Tomógrafo 
Fig. 20 – Tomógrafo


Tomografia
A tomografia computadorizada é um exame de imagem não invasivo. É a junção do equipamento do Raio-X com computadores programados capazes de produzir imagens de altíssima qualidade dos órgãos internos [AD].
Por combinar a imagem de múltiplos raio-x, esse exame oferece um estudo muito mais detalhado do que uma radiografia comum. É utilizado para o estudo de diversas partes do corpo e tem a capacidade de diagnosticar diversos tipos tumores. [AD].
Como citado anteriormente, a tomografia e o Raio X são considerados na medicina exames não invasivos, veja um exemplo aqui. Porém isso não é verdade, durante o raio X o ser humano ou animal, é exposto a radiação durante o processo de aquisição da imagem. O fato da pessoa ou animal estar parada, não ser tocada e não precisar fazer nada, não exime o fato dele estar sendo invadida por milhões de raios X.
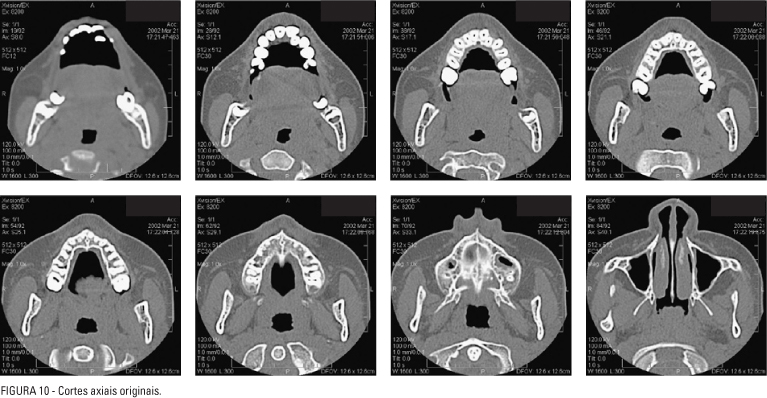
Fig. 21- Tomografia Dental 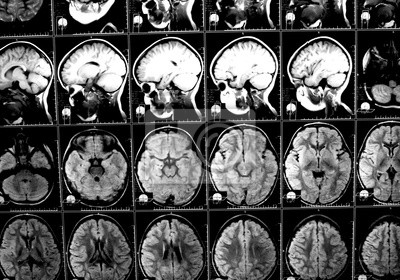
Fig. 22 – Tomografia cérebro


Ultrassom/Ecografia

Uma outra forma de visualizar partes dos órgãos humanos, é por meio da ultrassonografia ou ecografia, pelo equipamento ultrassom. Esta técnica, diferente de todas as citadas acima, produz imagens a partir do som gerado pelo equipamento, sem a necessidade de utilizar o espectro eletromagnético e sem utilizar radiação ionizante.
O exame é feito com um equipamento chamado de transdutor (dispositivo utilizado em conversão de energia de uma natureza para outra), que é posicionado na área anatômica do órgão que deve ser examinado. O aparelho funciona de modo que emite som e recebe o eco de volta, transformando a energia mecânica em elétrica. É neste processo, que ocorre a formação das imagens no computador [SF].
A ultrassonografia convencional é utilizada para examinar os diversos órgãos do abdômen, área musculoesquelética (músculos e tendões), estruturas superficiais (tireoide, glândulas salivares, mamas), assim como exames cerebrais em recém-nascidos e crianças de até um ano de idade [KZ].

Fig. 24 – Ultrassonografia Rim 
Fig. 25 – Ultrassonografia Útero


Ressonância magnética
A ressonância magnética registra as imagens através de cortes nas estruturas corporais, de forma semelhante a tomografia computadorizada, mas com mais detalhes e maior nitidez. Sendo que, diferente da tomografia, ela não utiliza radiação ionizante.
A máquina de ressonância magnética (RM), tem um grande ímã que interage com o corpo por meio de campos magnéticos e pulsos de radiofrequência. Assim, cria imagens em alta definição em três planos: horizontal, vertical e com o corpo dividido em camadas. Por não emitir radiação e ser bem completo, o exame tem um custo relativamente alto [CP].
Uma imagem gerada por ressonância magnética, exibe padrões distintos dos tecidos biológicos. Em síntese, a imagem é uma exibição dos sinais de radiofrequência que foram emitidos e captados no processo da geração da imagem [STAR]. A imagem é gerada em três etapas:
1ª Alinhamento: a propriedade magnética dos núcleos de alguns átomos do corpo humano, se orientam em paralelo a um forte campo magnético em que o paciente é colocado.
2ª Excitação: o aparelho de RM emite uma onda eletromagnética, na frequência de cada núcleo de hidrogênio mudando a direção do seu vetor de energia [STAR].
3ª Detecção de Radiofrequência: quando os núcleos de hidrogênio retornam ao estado habitual, emitem ondas eletromagnéticas que são captadas pela máquina de RM [STAR].
No final do processo, a máquina RM, converte os sinais de radiofrequência (ondas sinusoidal) e realiza o processamento computadorizado para gerar as imagens.
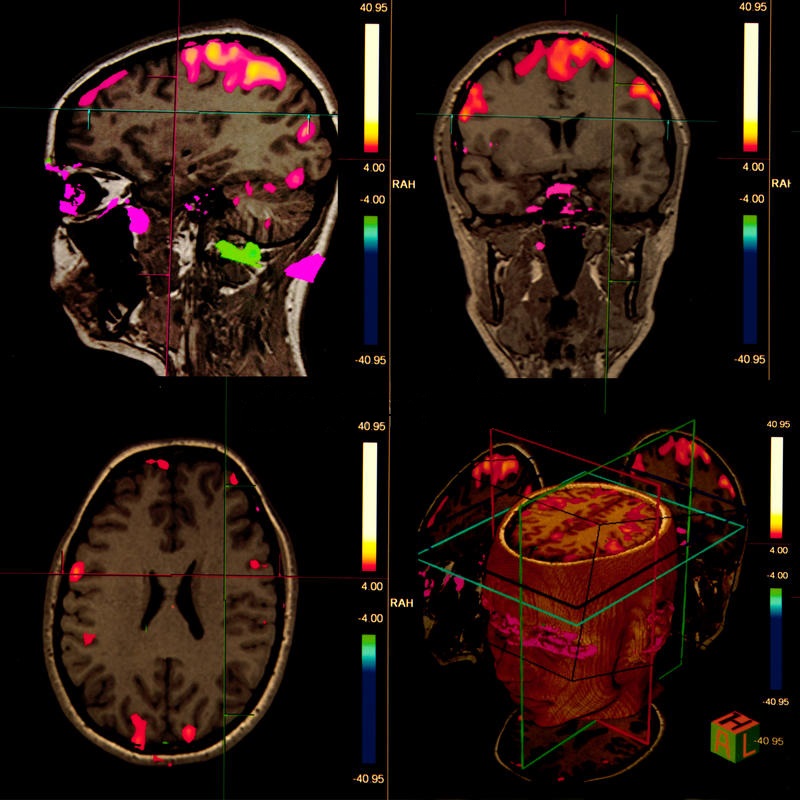
Fig. 26 – Imagens R.M. 3D. 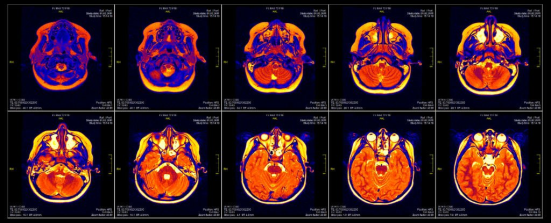
Fig. 27 – Imagens R.M. em camadas


Câmera ultravioleta (UV)

Essa faixa de radiação eletromagnética tem um comprimento de onda menor que a da luz visível, mas maior que a dos raios X. É por isso que o nome Ultravioleta é usado. O termo significa “mais alto que o violeta”, já que essa é a cor visível com comprimento de onda mais curto e maior frequência. O funcionamento da câmera UV é idêntico ao da câmera fotográfica normal porém com sensores sensíveis ao ultravioleta.
Abaixo duas imagens captadas por câmeras UV. A esquerda é o trabalho fotográfico de Craig Burrrows que retirou fotos de flores fluorescentes e adaptou a escala de cores para podermos velas, e a direita o trabalho de Thomas Leveritt que filmou pessoas aplicando protetor solar em seus rostos, e demonstrou o resultado da proteção ultravioleta destes protetores com a filmagem.

Fig. 29- Flores Fluorescentes Autor Craig Burrows 
Fig 30 – Proteção solar UV Protetor solar Autor Thomas Leveritt



Câmera multiespectral
A câmera multiespectral são câmeras que capturam o espectro visível de cor e o infravermelho próximo. Em resumo uma câmera fotográfica que também capta o NIR. Existem modelos capazes de captar o ultravioleta.
Normalmente as bandas de luz captadas são azul, verde, vermelho, Infra vermelho próximo e alguns casos UV.
Este tipo de câmera é muito utilizado para sensoriamento remoto de campo e vegetações em geral. Pois existem diversas técnicas capazes de identificar a qualidade da vegetação como: NDVI; EVI; SAVI e; VARI.

Câmera hiperespectral
Esta câmera tem como objetivo coletar e processar informações de todo o espectro eletromagnético. O objetivo da imagem hiperespectral é obter o espectro de cada pixel na imagem de uma cena, com o objetivo de localizar objetos, identificar materiais entre outros.
A quantidade de bandas (cores e categorias de espectros) captadas por essas câmeras varia de equipamento para equipamento iniciando com 5 e ultrapassando 30 bandas espectrais. As possibilidades de uso deste tipo de equipamento são dos mais variados possíveis, seguem exemplos de áreas e aplicações retirados do site Astro34.
Minérios: exploração mineral, gerenciamento de recursos e monitoramento ambiental;
Agricultura: o monitoramento do desenvolvimento e da saúde das culturas;
Geologia: mapear rapidamente quase todos os minerais de interesse comercial;
Astronomia: para determinar uma imagem espectral espacialmente resolvida;
Forças Armadas: detecção de minas terrestres, identificação e capacidade de imagem para agentes de guerra química;
Petróleo: identificar fontes de petróleo na terra;
Ecologia: vigilância e pesquisa histórica de manuscritos;
Pesquisas em áreas como nanodroga entrega e nanotoxicologia;
Pesquisas: pesquisa de vegetação, forense, ciências da vida, análise de alimentos e pesquisa mineral.



Com esta variedade de câmeras, percebemos que o que computadores podem enxergar vão muito além de nossas capacidades. Para o profissional de visão computacional e processamento de imagens é importante saber desta variedade de possibilidades, pois a solução para determinado problema pode ser apenas uma lente diferente.
Referências:
[IE] Info Escola. Espectro Eletromagnético. Acessado em 04 set 2021
[C] CALDAS, J. Museu Interativo da Física da UFPA: Ação educativa com ênfase em divulgação e popularização da História e da Filosofia da Ciência para o ensino de Física. 2015. Trabalho de Conclusão de Curso. Faculdade de Física. Universidade Federal do Pará, Belém, 2015.
[GW] GONZALEZ, R. C., WOODS, R. E. Processamento de Imagens Digitais.
Editora Edgard Blucher, ISBN 978-85-8143-586-2, 3 ed., São Paulo, 2010
[PS] Pedrini, H.; Schwartz, W. R.; Análise de Imagens Digitais: Princípios, Algoritmos e Aplicações. Thomson Learning, 2007
[PEH] HOCKBERGER, Philip E. A History of Ultraviolet Photobiology for Humans, Animals and Microorganisms¶. Photochemistry and Photobiology. [S. l.]: American Society for Photobiology, 1 maio 2007. DOI 10.1562/0031-8655(2002)0760561ahoupf2.0.co2.
[IDL] International Day of Light; Herschel experiment: the discovery of the infrared. Acessado em 04 set 2021
[WCR] MLA style: Wilhelm Conrad Röntgen – Facts. NobelPrize.org. Acessado em 8 nov 2021.
[WG] Wolfschmidt, Gudrun. Heinrich Hertz (1857-1894) and the Development of Communication. Dezembro de 2007 DOI: 10.13140/2.1.4733.3764
[CH] Chicago, The New Encyclopaedia Britannica, Encyclopaedia Britannica, 2007
[NKOT] Nishida, S.M.; K de Oliveira, F.A.; Troll, J. Como funciona o corpo humano? Acessado em 23 jan 2022.
[TER] Tecnologia E Rede .Diferença entre câmera térmica e câmera infra-vermelha. Acessado em 25 jan 2022.
[IT] InstruTemp. O que é uma câmera termográfica e quando ela pode ser útil .Acessado em 25 jan 2022.
[MK] Microsoft. Câmera de profundidade do Azure Kinect DK. Acessado em 25 jan 2020
[ME] Mundo e Educação. O Raio Laser. Acessado em 25 jan 2020
[INE] Depto. de informática e estatística. Visão Estéreo. Acessado em 27 jan 2020
[JAM] José Aldair Morsch. TIPOS DE EQUIPAMENTOS DE RAIO X E TELERRADIOLOGIA. Acessado em 28 jan 2022.
[AD] Alta Diagnosticos. TOMOGRAFIA COMPUTADORIZADA. Acessado em 28 jan 2022.
[KZ] kozma. Ultrassonografia. Acessado em 28 jan 2022.
[SF] Sergio Franco. ECOGRAFIA (ULTRASSONOGRAFIA):. Acessado em 28 jan 2022.
[STAR] State of The Art Radiology. Ressonância Magnética: Guia Completo e Ilustrado. Acessado em 29 jan 2022.
[CP] Chloé Pinheiro. Ressonância magnética: o que é e para que serve. Acessado em 29 jan 2022.
[A34] Astro34. O que é uma câmera hiperespectral?. Acessado em 31 jan 2022.

